2000年以后随着MEMS技术的发展以及电子航空发烧友的增加,从航模向无人机的转变趋势日趋明显,很多FCM,FCU(Flight Control Module/Unit,词条解释请移步:城堡里学无人机:无人机行业用语词典(Keep 更新ing),下同)开始出现在人们面前:国内的KK,QQ,玉兔等,法国的MWC,德国的MikroKopter,Auto Quad,美国的Apm系列,穿越机常见的CC3d,Naze32,F3等。这些FCU通过相应的控制算法,对无人机系统反馈的状态信息(城堡里学无人机:状态视角深入无人机硬件与算法)进行解算,根据解算出的状态数据结合算法(一般为线性控制算法)计算控制量并输出。FCU本身往往只涉及很小一部分状态信息的采集,同时内部算法一般只针对无人机本身的姿态控制或者轨迹跟踪(很少)。因此在系统硬件构成上不包含某些状态信息获取单元如GPS,超声,红外,光流,双目等,或者不对某些状态信息进行处理(如某些不处理外环状态)。
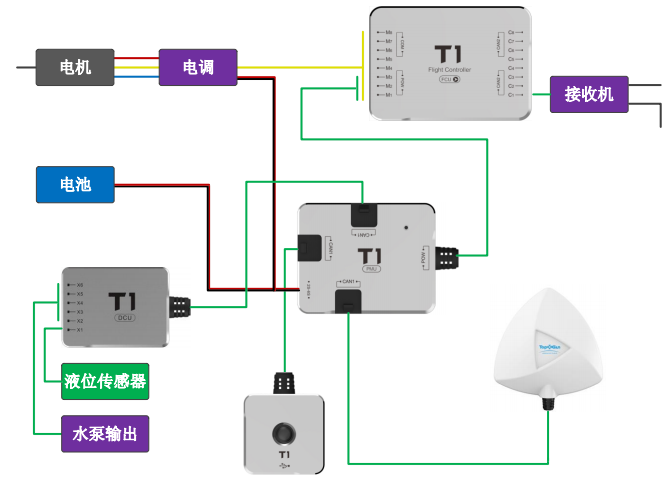
在2012年之后,随着航拍等市场需求的挖掘,无人机控制开始从FCM,FCU转向FCS(Flight Control System),无人机厂家开始生产各自的飞控产品,该类产品更多是应用在该企业无人机产品所面对的市场领域。这类产品与FCU在系统范围(或元素组成)上有着明显的区别,一般不止包括FCU所涵盖的范畴,也包括数据获取(如云台、摄像头等)模块,数据通讯模块,GPS模块,配套的地面站(PC端,移动端),SDK等。
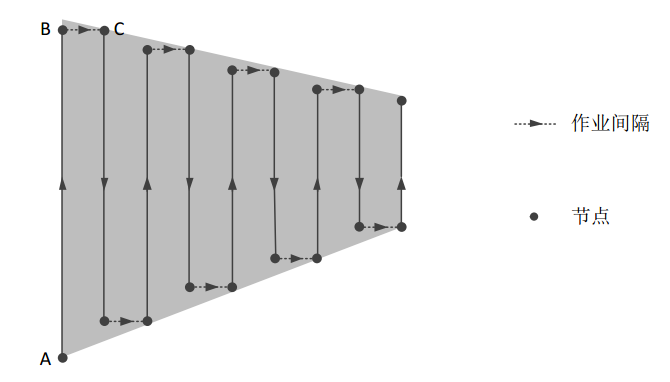
但这种转型并没有彻底完成,由于FCS的系统架构,系统设计,相关算法,地面站功能等各个方面都与无人机本身的应用行业息息相关,对于企业而言,真正的难点在于如何实现无人机技术与行业应用的衔接,即FCS的产品设计与技术发展不止于无人机,更重要的是延伸到无人机应用的行业中去。



 窥视卡
窥视卡 雷达卡
雷达卡










 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 照妖镜
照妖镜

