46
818
1628
金牌飞友
使用道具 举报
430
475
1350
384
436
1216
403
446
1262
49
875
1741
40
943
1885
41
848
1682
53
885
1760
59
902
1805
44
867
1706
本版积分规则 发表回复 回帖后跳转到最后一页



 窥视卡
窥视卡 雷达卡
雷达卡


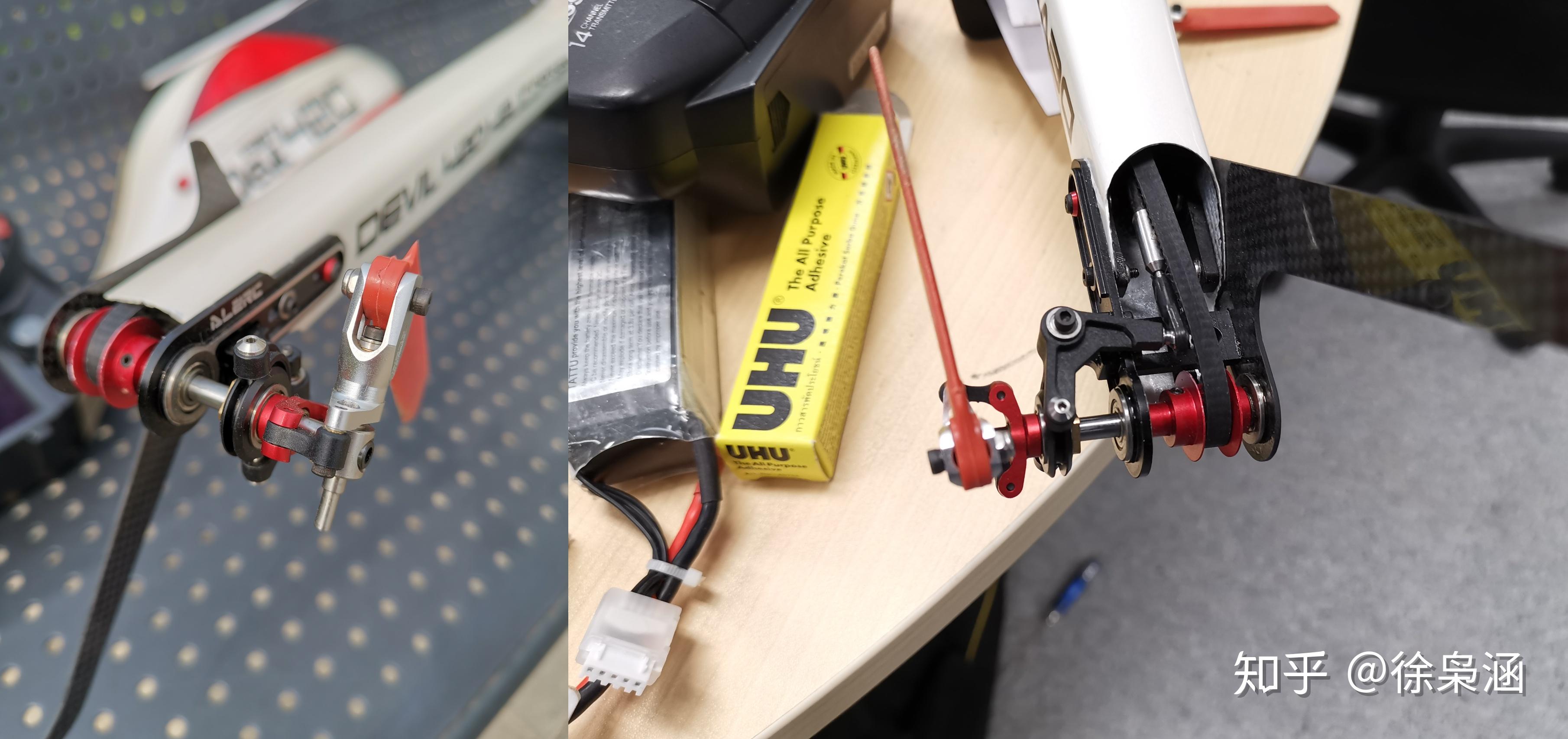
波箱:浅谈直驱航模直升机和一架航模直升机的尾 ...-1.jpg")
波箱:浅谈直驱航模直升机和一架航模直升机的尾 ...-2.jpg")
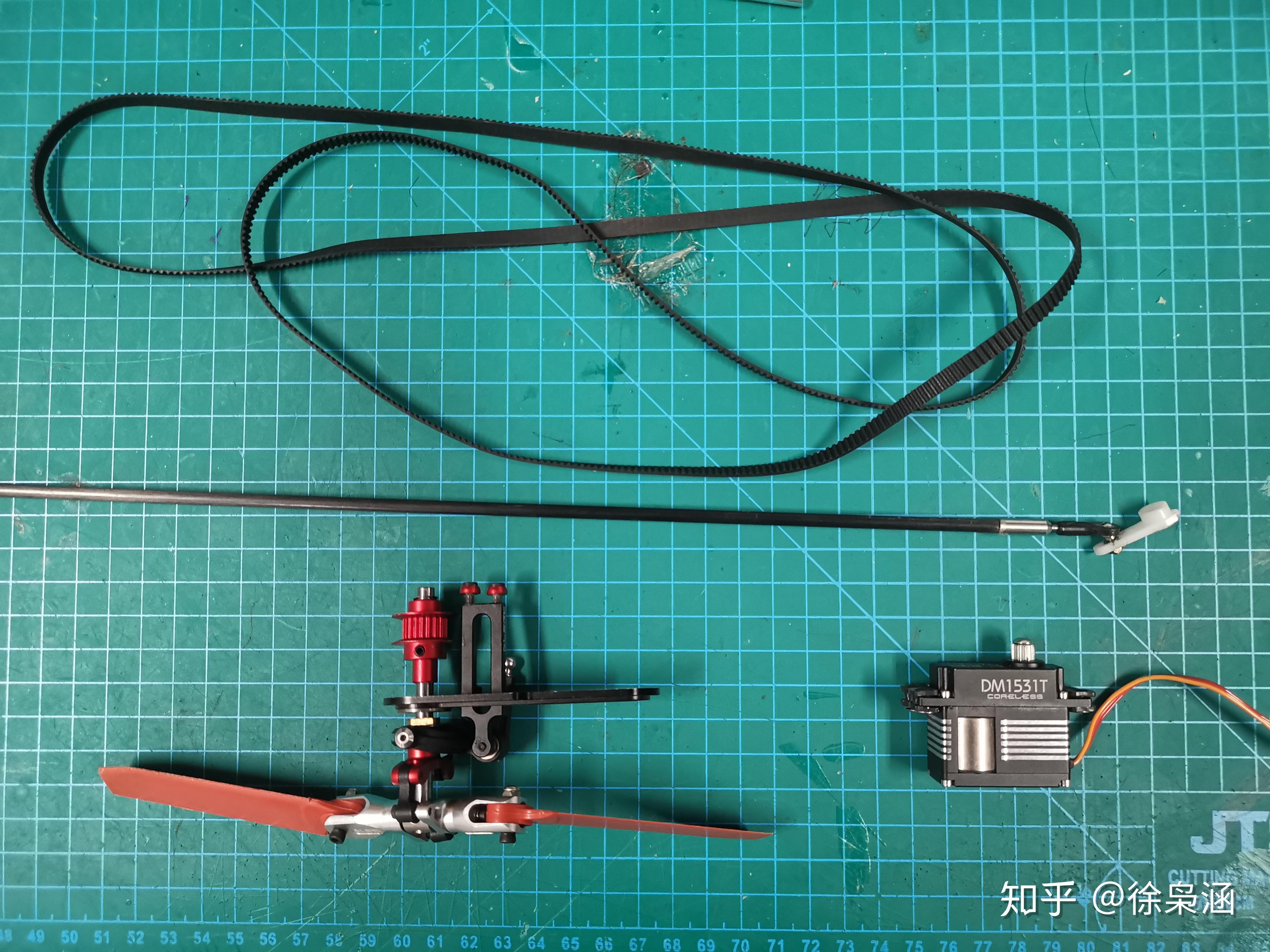
波箱:浅谈直驱航模直升机和一架航模直升机的尾 ...-3.jpg")
波箱:浅谈直驱航模直升机和一架航模直升机的尾 ...-4.jpg")
波箱:浅谈直驱航模直升机和一架航模直升机的尾 ...-6.jpg")
波箱:浅谈直驱航模直升机和一架航模直升机的尾 ...-7.jpg")
波箱:浅谈直驱航模直升机和一架航模直升机的尾 ...-8.jpg")
波箱:浅谈直驱航模直升机和一架航模直升机的尾 ...-9.jpg")
波箱:浅谈直驱航模直升机和一架航模直升机的尾 ...-10.jpg")
波箱:浅谈直驱航模直升机和一架航模直升机的尾 ...-12.jpg")
波箱:浅谈直驱航模直升机和一架航模直升机的尾 ...-13.jpg")
波箱:浅谈直驱航模直升机和一架航模直升机的尾 ...-14.jpg")
波箱:浅谈直驱航模直升机和一架航模直升机的尾 ...-15.jpg")
波箱:浅谈直驱航模直升机和一架航模直升机的尾 ...-16.jpg")
波箱:浅谈直驱航模直升机和一架航模直升机的尾 ...-17.jpg")
波箱:浅谈直驱航模直升机和一架航模直升机的尾 ...-18.jpg")
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 照妖镜
照妖镜

