|
|
通过之前的文章
我们看到APM的源码虽然做了轴角分离,但是对yaw的限制处理不够,但是这样的处理到底有什么效果呢?我把这段程序用MATLAB移植了,可以直观的从数字上看到结果。
思路:设置相同的当前姿态,和期望姿态,分别用直接四元数计算误差,和倾转分离后四元数计算误差,然后分别转成轴角,这个轴角就是控制器接收到的误差,我们来看看这个两组数据上有什么区别。(最后有一段程序是单独现在z轴的,但是默认是26度,而且需要姿态更新到下一周期生效,这一部分先不考虑,所以这次对比保持z轴在26度以内)
实验:
为了直观,设置姿态使用欧拉角形式 单位 度
当前姿态【0,0,0】,期望姿态【30,30,25】
误差为轴角形式 单位 度
直接计算误差为【22.3280 ,35.0479 ,16.0488】 简称【完全误差】
倾转分离误差为【16.9144 ,37.8010 ,16.7880】 简称【分离误差】
从数字上来看,z轴的误差区别不大,主要是x,y轴的误差有区别,但也相差不多。
为了直观我们把对应的姿态画出来,
绿色为当前姿态,和黑色的NED坐标系是重合的,
红色为期望姿态,和蓝色的【完全误差】是重合的,很好理解,因为完全误差就是全部的误差,所以当前姿态加上全部的姿态肯定和期望姿态完全重合。
粉红色的是【分离误差】,因为是处理后的误差所以,无法和期望误差完全重合,但是,z轴也没有对齐,这点有些出乎意料,原本我以为倾转分离的目标就是z轴对齐,然后x,y有点误差。
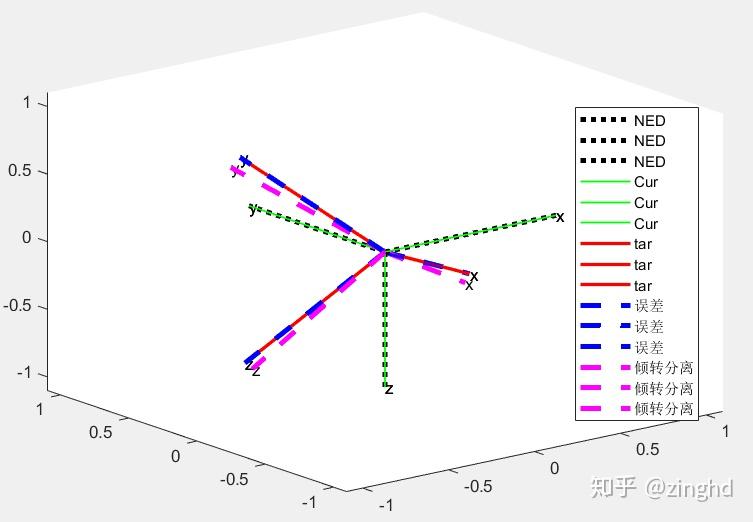
于是我把中间过程也分析了一下。
先计算中间过程 也就是对齐z轴的过程,简称【倾斜误差】
【倾斜误差】为【19.8108 ,37.1418 ,6.7148】
![[飞控]倾转分离(一)-APM的倾转分离竟然没有效果?-2.jpg](data/attachment/forum/202210/28/080333hszwr4we2rspjr06.jpg "[飞控]倾转分离(一)-APM的倾转分离竟然没有效果?-2.jpg")
可以看到,【倾斜误差】确实可以把z轴对齐,这个和我们想的是一样的。
然后计算【旋转误差】= 【0.0000 ,0.0000 ,16.7880】,
把这【倾斜误差】和【旋转误差】组合,蓝色的坐标系 完全重合与 红色的期望姿态。(这里的组合是先旋转后倾斜,因为我们计算的时候是先倾斜后旋转)
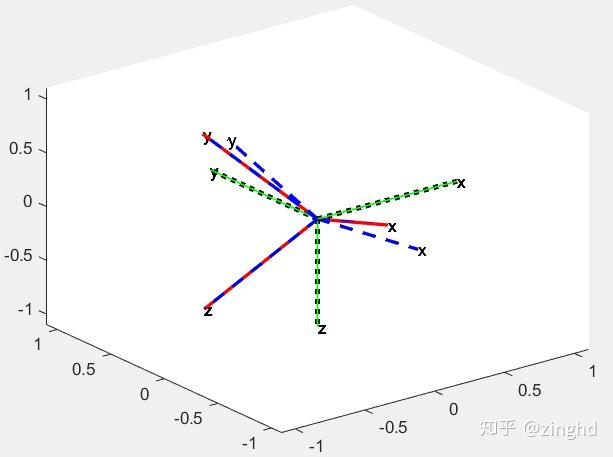
也就是说,分离出来的两次旋转没有错误,【倾斜误差】可以对其z轴,【旋转误差】可以对其偏航。
但是因为APM 直接把【倾斜误差】的z轴数据给抛弃了,所以导致,最后的误差连z轴都对不齐。
Vector3f rotation;
thrust_vec_correction_quat.to_axis_angle(rotation);
att_diff_angle.x = rotation.x;
att_diff_angle.y = rotation.y;
yaw_vec_correction_quat.to_axis_angle(rotation);
att_diff_angle.z = rotation.z;
这个现象确实和想象中我不一样,
我看 APM 程序的时候最大的两个疑惑
1.为什么倾转分离后没对 yaw 做处理(26度以内的yaw)
2.为什么直接抛弃【倾斜误差】的z轴,难道是为了限制yaw?
现在看来,这两个疑惑都和实验吻合了,因为没对yaw做限制,所以【完全误差】和【分离误差】的 yaw 几乎一致,因为抛弃了【倾斜误差】的z轴,所以最后连z轴都对不齐。
为了解决这个疑惑我又去看了 PX4 的算法,没想到 PX4 的算法更新了,初步看了一下,又多了个几个疑惑
3.为什么 APM 说是四元数算法,但是过程中各种转旋转矩阵,转轴角,转换次数多了会引入新的误差,倒是PX4,一套四元数用到最后才转轴角,并且每次都会归一化来减少误差。
具体细节等下次我来对比 PX4 的算法仔细分析一下。
总结:APM 的算法除了最后的轴角处理感觉很奇怪,之前的过程思路还很清晰很好理解的,主要问题就是就是没有对 yaw 做处理 , 以及抛弃的【倾斜误差】的z轴 ,所以导致实验结果就是,这套算法有倾转分离,和没倾转分离差别不大。
部分源码:
%NED坐标系 当前机体坐标系 期望机体坐标系 (度)
NED=[0 0 0];
Cur_angle=[0 0 0];
Des_angle=[30 30 25];
%机体坐标系转换为弧度
cur_angle_radian=[Cur_angle(1)*pi/180,Cur_angle(2)*pi/180,Cur_angle(3)*pi/180] ;
des_angle_radian=[Des_angle(1)*pi/180,Des_angle(2)*pi/180,Des_angle(3)*pi/180];
%在NED下 画出 机体坐标系
plot_rotate_NED([0,0,0],Cur_angle,['g','g','g'],'-',1)
plot_rotate_NED([0,0,0],Des_angle,['r','r','r'],'-',1)
%当前姿态 Ccur->N
cur_dcm= euler2dcm(cur_angle_radian(1),cur_angle_radian(2),cur_angle_radian(3));
att_from_quat=euler2qual( cur_angle_radian(1),cur_angle_radian(2),cur_angle_radian(3) );
%当前姿态的旋转矩阵 取出z轴列(z轴单位向量) Zcur(N)
cur_att_thrust_vec=cur_dcm*[0;0;1];
%期望姿态 Ctar->N
des_dcm = euler2dcm( des_angle_radian(1),des_angle_radian(2),des_angle_radian(3) );
att_to_quat=euler2qual( des_angle_radian(1),des_angle_radian(2),des_angle_radian(3) );
%期望姿态的旋转矩阵 取出z轴列(z轴单位向量) Ztar(N)
des_att_thrust_vec=des_dcm*[0;0;1];
%不使用倾转分离的思路,直接计算 目标姿态-初始姿态=总误差姿态
all_correction_quat = Q_multipli( Q_INV(att_from_quat),att_to_quat );
%%N系下 两个向量的**旋转误差**
thrust_vec_cross=cross(cur_att_thrust_vec,des_att_thrust_vec);
%z轴误差角度 弧度
thrust_vec_dot=acos(dot(cur_att_thrust_vec,des_att_thrust_vec));
thrust_vector_length=norm(thrust_vec_cross);
if( (thrust_vector_length==0) || (thrust_vec_dot==0))
thrust_vec_cross = [0,0,1];
thrust_vec_dot = 0.0;
else
thrust_vec_cross = thrust_vec_cross/thrust_vector_length;
end
%轴角 转 四元数 描述的是 目标转到初始的旋转 所以对应的旋转是 Qtb1->cb 转轴在N系
thrust_vec_correction_quat=axis_angle2Q(thrust_vec_cross,thrust_vec_dot)
%%旋转 Qtb1->cb 转到初始坐标系
thrust_vec_correction_quat=Q_multipli(Q_INV(att_from_quat),Q_multipli(thrust_vec_correction_quat,att_from_quat))
%%画出 初始姿态 加上**倾斜误差** 之后的姿态 结果是 z轴对齐了
plot_rotate_body([0,0,0],Cur_angle,quat2euler(thrust_vec_correction_quat)*57.3,['g','g','g'],'-.',2)
%%画出 初始姿态 加上总误差 之后的姿态 结果是 两个坐标系完全重合
plot_rotate_body([0,0,0],Cur_angle,quat2euler(all_correction_quat)*57.3,['b','b','b'],'--',2)
%Qcb->tb1 * Qn->cb * Qtb->n = Qtb->tb1 (即**旋转误差**)
yaw_vec_correction_quat = Q_multipli(Q_INV(thrust_vec_correction_quat),Q_multipli(Q_INV(att_from_quat),att_to_quat));
all_axis_angle=Q2axis_angle(all_correction_quat);
tilt_axis_angle=Q2axis_angle(thrust_vec_correction_quat);
torsion_axis_angle=Q2axis_angle(yaw_vec_correction_quat);
tilt_torsion_angle=[tilt_axis_angle(1),tilt_axis_angle(2),torsion_axis_angle(3)]*57.3
att_diff_angle_x = tilt_axis_angle(1);
att_diff_angle_y = tilt_axis_angle(2);
att_diff_angle_z = torsion_axis_angle(3);
%att_diff_angle_z 弧度 (0.46弧度 = 26度)
if(att_diff_angle_z > 0.46)
att_diff_angle_z = constrain_float(wrap_PI(att_diff_angle_z), -0.46, 0.46);
yaw_vec_correction_quat=Q_from_axis_angle([0,0,att_diff_angle_z]);
att_to_quat = Q_multipli( att_from_quat,Q_multipli(thrust_vec_correction_quat,yaw_vec_correction_quat));
end
这个结果很出人意料,所以非常希望各位感兴趣的朋友,加我的微信,多和我交流,如有问题欢迎指正。
关注微信公众号【无人机干货铺】,回复【倾转分离】可以获得这次实验的源码,期待你的关注。
![[飞控]倾转分离(一)-APM的倾转分离竟然没有效果?-4.jpg](data/attachment/forum/202210/28/080333stz9aem2yan3m71f.jpg "[飞控]倾转分离(一)-APM的倾转分离竟然没有效果?-4.jpg")
|
|



 窥视卡
窥视卡 雷达卡
雷达卡


 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 照妖镜
照妖镜

