|
|
当前鹅乌战争,让我们看到无人机正在深刻改变世界!
今天介绍github上最火的无人机仿真平台【中国人开发,真的很自豪】
看到中国有这么强大的无人机产业,又有这么好的无人机开源项目,小编我真的是热泪盈眶,大喊一声:
开源强则软件强!呼吁大家支持中国开源项目!
国内镜像源代码:
http://www.gitpp.com/plang/xtdrone
github:
https://github.com/robin-shaun/XTDrone
XTDrone是基于PX4、ROS与Gazebo的无人机通用仿真平台。支持多旋翼飞行器(包含四轴和六轴)、固定翼飞行器、复合翼飞行器(包含quadplane,tailsitter和tiltrotor)与其他无人系统(如无人车、无人船与机械臂)。在XTDrone上验证过的算法,可以方便地部署到真实无人机上。
在这个平台上,开发者可以快速验证算法。如:
双目SLAM
视觉惯性导航

视觉稠密重建

2D激光SLAM

3D激光SLAM

2D运动规划


3D运动规划

集群运动规划

目标检测与追踪

多机编队


多机精准降落

固定翼

复合翼

无人车


无人船

空中机械臂

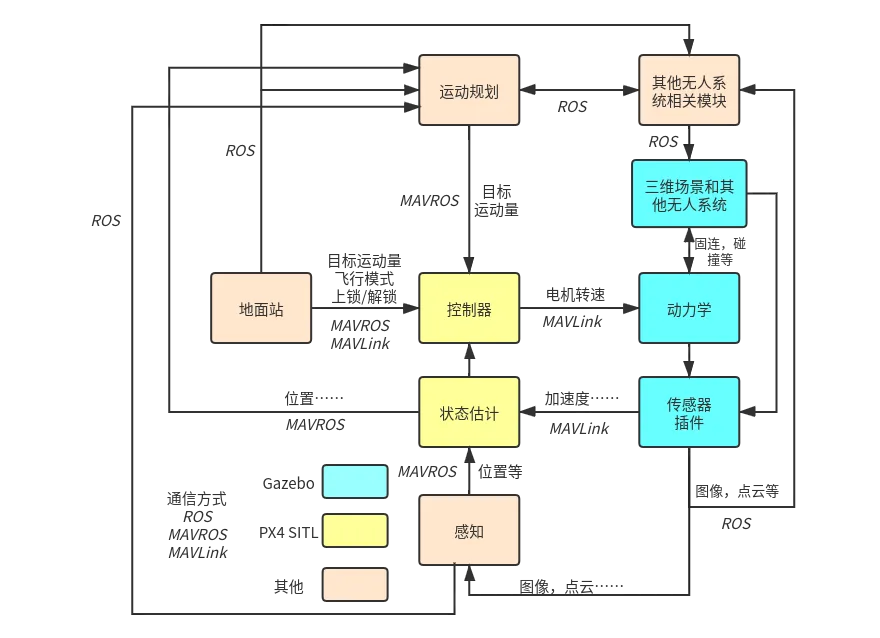
单机仿真架构如下图所示,详见论文
K. Xiao, S. Tan, G. Wang, X. An, X. Wang and X. Wang, "XTDrone: A Customizable Multi-rotor UAVs Simulation Platform," 2020 4th International Conference on Robotics and Automation Sciences (ICRAS), 2020, pp. 55-61, doi: 10.1109/ICRAS49812.2020.9134922.
预印版 arXiv:2003.09700
论文解析:XTDrone: A Customizable Multi-rotor UAVs Simulation Platform
摘要:
随着无人机(UAV)技术的快速发展,对高效、可靠的仿真平台的需求也日益增长。XTDrone作为一个可定制的多旋翼无人机仿真平台,为研究者和开发者提供了一个强大的工具,用于算法开发、测试和验证。本论文将深入解析XTDrone的架构、功能及其在无人机研究中的应用。
1. 引言:
无人机技术的广泛应用使得对其性能和可靠性的要求越来越高。在实际部署之前,通过仿真平台对无人机算法进行验证和测试是至关重要的。XTDrone平台应运而生,旨在提供一个高度可定制、易于使用的多旋翼无人机仿真环境。
2. XTDrone平台架构:
XTDrone平台基于模块化设计,主要由以下几个部分组成:
仿真环境:基于Gazebo等高性能仿真器,提供逼真的物理环境和飞行动力学模拟。
飞行控制器:集成PX4等开源飞控固件,模拟真实无人机的飞行控制逻辑。
传感器模拟:模拟IMU、GPS、激光雷达等传感器数据,为算法提供必要的输入信息。
通信接口:实现仿真平台与外部控制算法或硬件设备的实时数据交换。
3. 可定制性:
XTDrone平台的一个显著特点是其高度的可定制性。用户可以根据研究需求自定义无人机的物理参数(如质量、尺寸、动力系统等)、传感器配置以及飞行环境。此外,XTDrone还支持多种控制算法和导航策略的集成与测试。
4. 应用案例:
提供了XTDrone在多个应用场景中的实例,如路径规划、避障、编队飞行等。这些案例展示了XTDrone在无人机算法开发和验证中的有效性和灵活性。
5. 实验与结果:
为了验证XTDrone平台的性能和准确性,论文包含了一系列实验和对比分析。这些实验可能涉及不同飞行场景下的无人机轨迹跟踪、稳定性测试以及算法性能评估等方面。实验结果证明了XTDrone在无人机仿真研究中的实用性和可靠性。
6. 结论与展望:
论文总结了XTDrone平台的主要贡献和优势,并指出了未来可能的研究方向。随着无人机技术的不断进步和应用领域的拓展,XTDrone有望成为一个更加完善、功能更加丰富的无人机仿真平台。
需要注意的是,以上内容是小编的摘要。实际论文的内容可能更加详细和深入,建议直接阅读原文以获取准确信息。
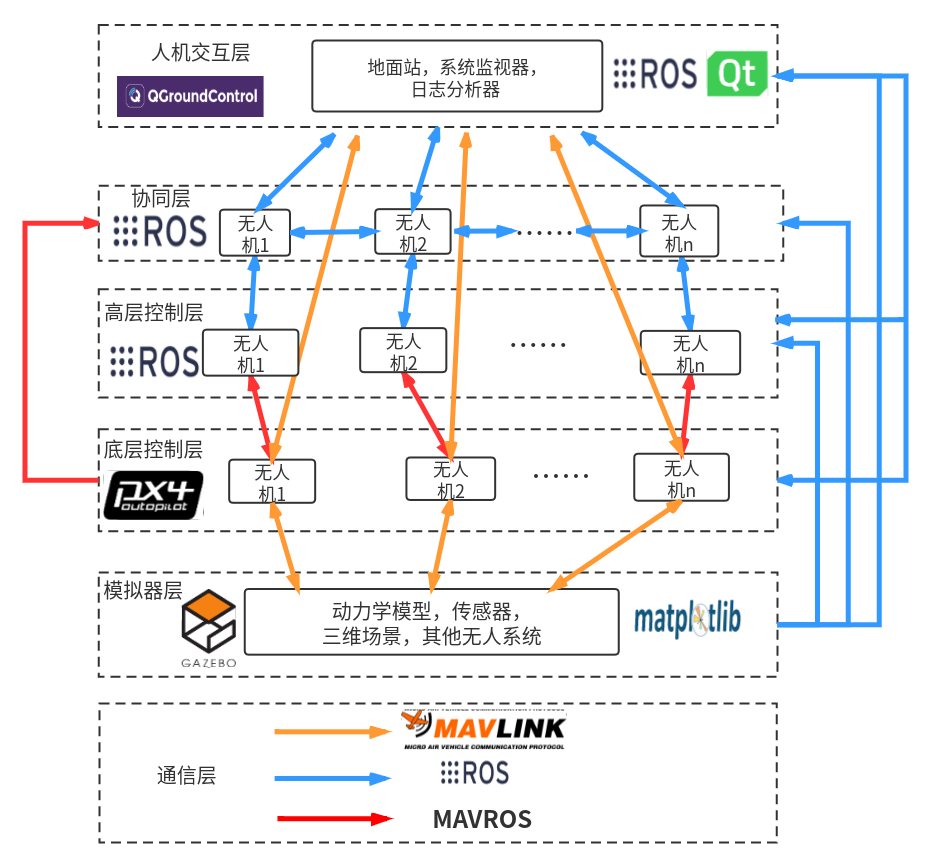
多机仿真架构如下图所示,详见论文
K. Xiao, L. Ma, S. Tan, Y. Cong , X. Wang, "Implementation of UAV Coordination Based on a Hierarchical Multi-UAV Simulation Platform," Advances in Guidance, Navigation and Control. Lecture Notes in Electrical Engineering, 2022, vol 644. Springer, Singapore. doi: 10.1007/978-981-15-8155-7_423
预印版 arXiv:2005.01125 (2020)
如果使用XTDrone用于学术论文的仿真验证,请引用上述的其中一篇论文。
论文解读:Implementation of UAV Coordination Based on a Hierarchical Multi-UAV Simulation Platform
一、引言
随着无人机(UAV)技术的飞速发展,多无人机协同控制成为研究的热点。为了有效验证协同控制算法,需要构建一个高效、可靠的多无人机仿真平台。本文介绍了一种基于层次化结构的多无人机仿真平台,用于实现无人机之间的协同。
二、仿真平台架构
该仿真平台采用层次化设计,主要包括以下几个层次:
物理层:负责模拟无人机的物理特性和飞行环境,如空气动力学模型、重力、风力等。
控制层:实现无人机的飞行控制,包括位置控制、姿态控制等。这一层通常集成有PX4等飞控算法。
感知层:模拟无人机的传感器系统,如GPS、IMU、摄像头等,提供环境感知和定位信息。
协同层:这是平台的核心层,负责实现多无人机之间的协同策略,如编队飞行、任务分配、避障等。
应用层:提供用户接口,允许用户定义任务、配置无人机参数、监控飞行状态等。
三、协同控制实现
在协同层,平台实现了多种协同控制算法,如基于规则的协同、基于优化的协同和基于学习的协同等。这些算法可以根据不同的任务需求进行选择和配置。
此外,平台还支持无人机之间的通信模拟,确保协同控制算法能够在真实的通信环境下进行验证。通信模拟考虑了信号衰减、干扰和延迟等因素。
四、实验验证
为了验证仿真平台的有效性和协同控制算法的性能,作者进行了一系列实验。实验包括编队飞行、区域覆盖、目标追踪等典型任务。实验结果表明,该仿真平台能够准确模拟无人机的飞行特性和环境,协同控制算法也表现出了良好的性能。
五、结论与展望
本文介绍了一种基于层次化结构的多无人机仿真平台,用于实现无人机之间的协同控制。通过实验验证,证明了该平台的有效性和实用性。未来工作可以进一步扩展平台的功能,如增加更多类型的无人机模型、优化协同控制算法等。此外,还可以考虑将仿真平台与真实无人机硬件进行连接,实现虚实结合的验证方式。
XTDrone作为一个基于PX4、ROS与Gazebo的无人机通用仿真平台,确实为无人机算法的开发和验证提供了强大的支持。以下是关于XTDrone及其功能的一些详细解释:
PX4支持:PX4(Pixhawk 4)是一个流行的开源飞控固件,用于控制多旋翼、固定翼和复合翼等多种类型的无人机。XTDrone与PX4的集成使得开发者可以在仿真环境中模拟真实的无人机硬件行为,从而更准确地测试和验证飞行控制算法。
ROS集成:ROS(机器人操作系统)是一个用于机器人软件开发的框架。通过集成ROS,XTDrone可以与其他ROS兼容的传感器、算法和工具无缝对接,实现复杂的无人机任务规划和自主飞行功能。
Gazebo仿真环境:Gazebo是一个高性能的机器人仿真器,支持复杂的三维环境和物理引擎。在XTDrone中,Gazebo用于模拟无人机的飞行环境,包括天气条件、地形障碍等,从而提供更真实的飞行体验。
多类型无人机支持:XTDrone支持多旋翼(如四轴和六轴)、固定翼和复合翼(如quadplane、tailsitter和tiltrotor)等多种类型的无人机。这使得开发者可以在同一个平台上测试和比较不同类型的无人机算法和性能。
其他无人系统支持:除了无人机,XTDrone还支持无人车、无人船和机械臂等其他类型的无人系统。这为开发跨平台的无人系统算法提供了便利。
算法部署:在XTDrone上验证过的算法可以方便地部署到真实无人机上。这意味着开发者可以在仿真环境中进行算法开发和调试,然后将经过验证的算法直接应用到实际飞行中,从而加快开发进程并降低风险。
总的来说,XTDrone为无人机算法的开发、测试和验证提供了一个全面而高效的平台。通过结合PX4、ROS和Gazebo等先进技术,它使得无人机算法的开发变得更加简单、快速和可靠。
当前鹅乌战争,让我们看到无人机正在深刻改变世界!
今天介绍github上最火的无人机仿真平台【中国人开发,真的很自豪】
看到中国有这么强大的无人机产业,又有这么好的无人机开源项目,小编我真的是热泪盈眶,大喊一声:
开源强则软件强!呼吁大家支持中国开源项目!
国内镜像源代码:
http://www.gitpp.com/plang/xtdrone |
|



 窥视卡
窥视卡 雷达卡
雷达卡


 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 照妖镜
照妖镜

