|
|
0 前言
PX4的模块是构成PX4飞控系统的重要组成部分,负责实现特定的功能,如飞控算法、传感器数据处理、通信协议等。
每个模块负责特定的任务,例如:
navigator 模块负责航线规划与任务执行。
commander模块负责处理飞行模式切换和系统状态监控。
sensors模块负责传感器数据的采集与处理。
PX4的设计允许用户添加自定义模块,从而扩展系统的功能。模块之间通过UORB(微ORB)进行数据交换,实现高效的信息传递
本篇文章在PX4-AutoPilot 1.14.0版本中,加入了一个自定义的模块,打印了一条消息,作为PX4源码添加自定义模块方法。
1 PX4模块的代码架构介绍
在PX4的代码里 src/modules 文件夹下,有很多的不同名字的文件夹,每个文件夹就是一个模块
如下:
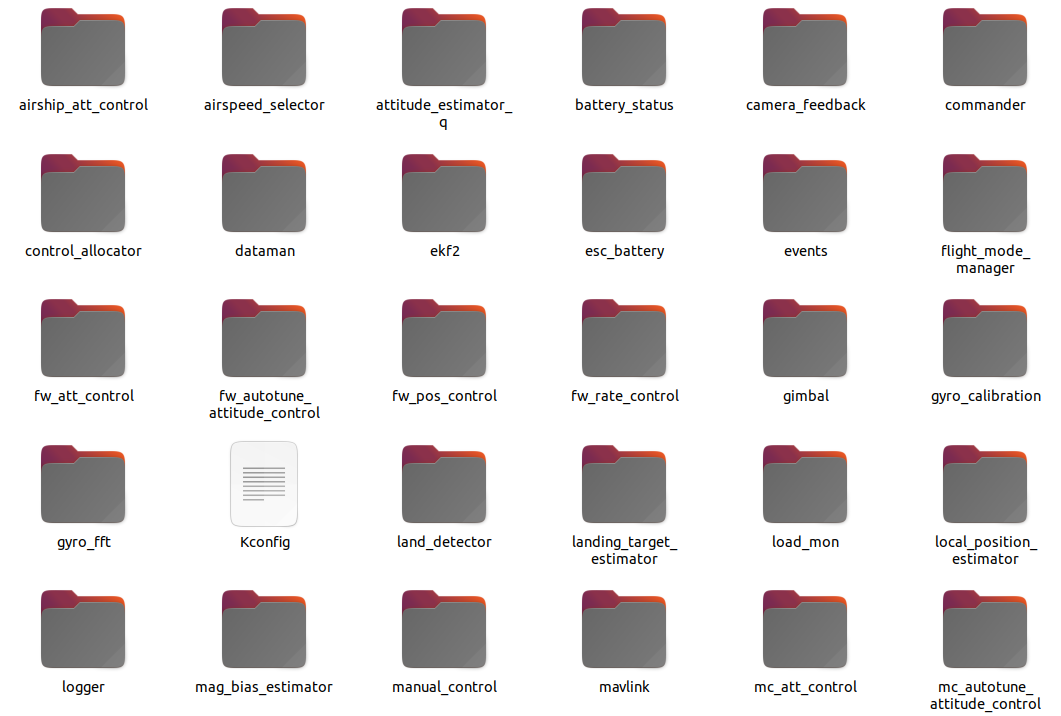
例如多旋翼位置控制任务文件夹 mc_pos_control ,点进入可以看到有一个cpp和hpp文件
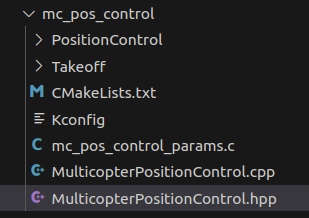
打开MulticopterPositionControl.hpp文件,这个是一个头文件,头文件里面一般是一个类

里面有个重要的函数Run

和这个位置控制模块一样,一般的某块需要包含:
一个cpp文件
一个hpp文件
一个**_params.c文件
一个CMakeLists.txt文件
一个Kconfig 文件
上面是最小的组成部分,如果还需要其它的库,则需要像位置控制模块一样再包含其它的文件夹(PositionControl、Takeoff),包含其它文件夹的个数不限。
2 新建分支避免弄乱源码
查看当前分支
git status

创建新分支
git branch feature_demo
切换到这个分支
git checkout feature_demo
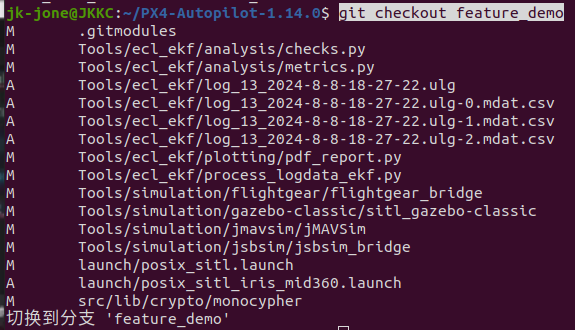
以前的改动被提示
3 创建新模块
3.1 新件文件
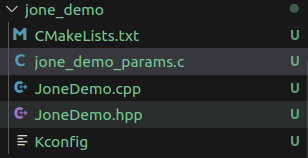
在PX4源码里的src/modules文件夹下创建一个新文件夹命名为 jone_demo
并且在里面新建第1节提到的最小组成部分,即那几个文件分别命名为:
CMakeLists.txt
jone_demo_params.c
JoneDemo.cpp
JoneDemo.hpp
Kconfig
3.2 编辑CMakeLists.txt文件
编辑CMakeLists.txt文件,该文件负责编译
还是观察mc_pos_control模块的源文件:
add_subdirectory(PositionControl)add_subdirectory(Takeoff)
px4_add_module( MODULE modules__mc_pos_control MAIN mc_pos_control COMPILE_FLAGS SRCS MulticopterPositionControl.cpp MulticopterPositionControl.hpp DEPENDS PositionControl Takeoff controllib geo SlewRate )
自定义的模块不需要 子文件夹 PositionControl 和 Takeoff 所以前两行可以删了
MODULE 模块的名字改为 modules__jone_demo
MAIN后面的改为 jone_demo
SRCS对应的文件名称进行修改
DEPENDS中 PostionControl 和Takeoff 没有对应的子文件,所以去掉,其它的可以保留
px4_add_module( MODULE modules__jone_demo MAIN jone_demo COMPILE_FLAGS SRCS JoneDemo.cpp JoneDemo.hpp DEPENDS controllib geo SlewRate )
3.3 编辑Kconfig文件
下面来修改Kconfig文件,该文件是生成可执行文件的
照着 mc_pos_control 的 模板改就可以了
源文件:
menuconfig MODULES_MC_POS_CONTROL bool"mc_pos_control" default n ---help--- Enable support for mc_pos_control
menuconfig USER_MC_POS_CONTROL bool"mc_pos_control running as userspace module" default y depends on BOARD_PROTECTED && MODULES_MC_POS_CONTROL ---help--- Put mc_pos_control in userspace memory
修改后文件:
menuconfig MODULES_JONE_DEMO bool"jone_demo" default n ---help--- Enable support for jone_demo
menuconfig USER_JONE_DEMO bool"jone_demo running as userspace module" default y depends on BOARD_PROTECTED && MODULES_JONE_DEMO ---help--- Put jone_demo in userspace memory
3.4 编辑**_params.c文件
下面修改参数文件 jone_demo_params.c
这个例程不需要参数,只是打印个消息,所以空的就行。
3.5 编辑**.hpp文件
下面修改头文件:JoneDemo.hpp
复制 MulticopterPositionControl.hpp 文件的内容
删除掉包含的头文件
#include"PositionControl/PositionControl.hpp"#include"Takeoff/Takeoff.hpp"
将原文件所有的 类名称 MulticopterPositionControl 替换为 JoneDemo
内容 只保留 public 里面的函数,和 private里面的Run函数和parameters_update函数,还有一个变量
classJoneDemo :public ModuleBase<JoneDemo>, public control::SuperBlock, public ModuleParams, public px4::ScheduledWorkItem{public: JoneDemo(); ~JoneDemo() override;
/** @see ModuleBase */ staticinttask_spawn(int argc, char *argv[]);
/** @see ModuleBase */ staticintcustom_command(int argc, char *argv[]);
/** @see ModuleBase */ staticintprint_usage(constchar *reason = nullptr);
boolinit();
private: voidRun()override; voidparameters_update(bool force); perf_counter_t _cycle_perf{perf_alloc(PC_ELAPSED, MODULE_NAME": cycle time")};};
构造函数和析构函数是每个类都有的
task_spawn、custom_command、print_usage函数每个模块也都有
3.6 编辑**.cpp文件
下面修改cpp文件:JoneDemo.cpp
同样复制 MulticopterPositionControl.cpp 文件的内容
原包含的头文件改为
#include"JoneDemo.hpp"
删除掉包含的头文件
#include"PositionControl/ControlMath.hpp"
将原文件所有的 类名称 MulticopterPositionControl 替换为 JoneDemo
构造函数将 _vehicle_attitude_setpoint_pub 、_vel_x_deriv、_vel_y_deriv、_vel_z_deriv 删掉,内容都删除
JoneDemo::JoneDemo(bool vtol) : SuperBlock(nullptr, "MPC"), ModuleParams(nullptr), ScheduledWorkItem(MODULE_NAME, px4::wq_configurations::nav_and_controllers){ }
析构函数不用改
JoneDemo::~JoneDemo(){ perf_free(_cycle_perf);}
初始化函数:
boolJoneDemo::init(){ ScheduleNow();
returntrue;}
参数更新函数parameters_update内容全部删除
设置飞行状态函数 set_vehicle_states 删除
Run函数,仅保留模板内容,并加入一个打印信息
voidJoneDemo::Run(){ if (should_exit()) { exit_and_cleanup(); return; }
// reschedule backup ScheduleDelayed(100_ms);
parameters_update(false);
perf_begin(_cycle_perf); printf("hello jone\r\n");
perf_end(_cycle_perf);}
generateFailsafeSetpoint函数删除
task_spawn 函数
intJoneDemo::task_spawn(int argc, char *argv[]){ JoneDemo *instance = new JoneDemo();
if (instance) { _object.store(instance); _task_id = task_id_is_work_queue;
if (instance->init()) { return PX4_OK; }
} else { PX4_ERR("alloc failed"); }
delete instance; _object.store(nullptr); _task_id = -1;
return PX4_ERROR;}
custom_command函数
intJoneDemo::custom_command(int argc, char *argv[]){ return print_usage("unknown command");}
print_usage 函数的描述修改,PRINT_MODULE_USAGE_NAME 里面的参数修改为jone_demo
intJoneDemo::print_usage(constchar *reason){ if (reason) { PX4_WARN("%s\n", reason); }
PRINT_MODULE_DESCRIPTION( R"DESCR_STR(### Description jone demo)DESCR_STR");
PRINT_MODULE_USAGE_NAME("jone_demo", "controller"); PRINT_MODULE_USAGE_COMMAND("start"); PRINT_MODULE_USAGE_DEFAULT_COMMANDS();
return0;}
main函数修改
extern"C"__EXPORT intjone_demo_main(int argc, char *argv[]){ return JoneDemo::main(argc, argv);}
注意 jone_demo_main 这个在 jone_demo 要和 CMakeLists.txt 文件中的 MAIN jone_demo 保持一致,否则报错
4 编译
编译
make px4_sitl_default
如果报错的话,需要看具体原因进行修改
运行gazebo仿真的
make px4_sitl_default gazebo
第一个的编译要慢一些
运行起来发现:没有要打印的东西

因为模块还没有加到PX4的运行代码里面去
下面把模块加到PX4的运行代码里面去
make px4_sitl_default boardconfig
新建了一个模块,可以通过这个指令,把模块加进去
刚进入,终端变成这样
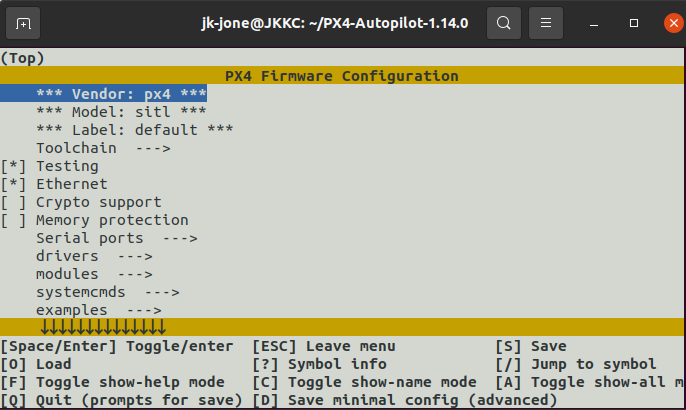
选择modules按回车
出来了很多的当前有的任务
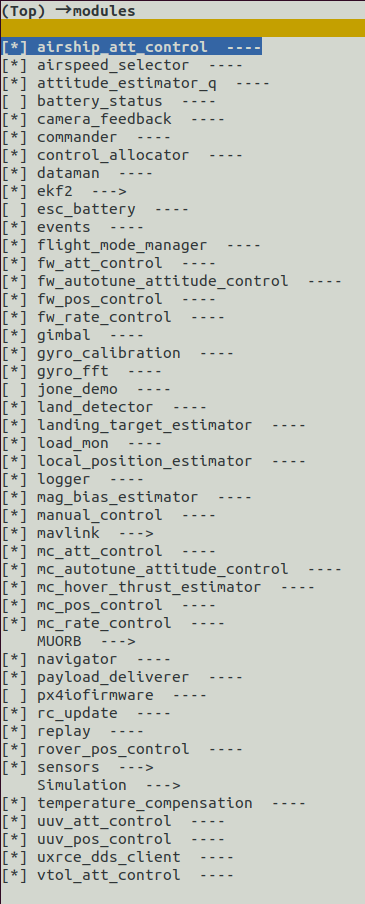
选到我们新建的任务 jone_demo
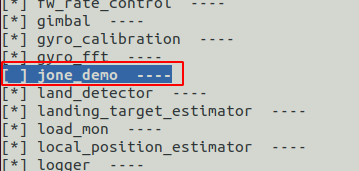
可以看到它前面的方框没有星号,然后按下空格建,就加上星了,也就加入了编译
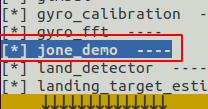
按下S,弹出下面内容,再回车进行保存,
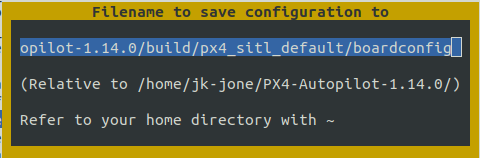

最后按q,即可退出该指令
然后再编译一次,看报不报错
make px4_sitl_default
编译过了

5 测试
5.1 代码启动终端开启运行
运行
make px4_sitl_default gazebo
还是没有,需要在上面启动的终端中,先按回车,再输入指令
jone_demo start

成功输出
为什么一定要在终端中 进行start才能运行呢,因为在
print_usage函数中有这样一行代码
PRINT_MODULE_USAGE_COMMAND("start");
在终端中输入了start才运行打印
5.2 代码启动直接运行
如果希望程序启动就运行,不需要外部输入指令的话,那么则需要涉及到ROMFS文件夹了,它就是负责启动的
打开该文件夹下的rc.mc.apps文件
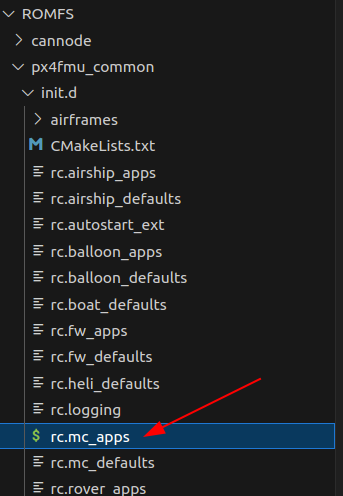
在最后加一句 jone_demo start,这样程序一启动就会运行
再启动一次就会发现,直接就输出了打印信息,不用在终端输入指令了
6 提交git
最后 git status 看下状态
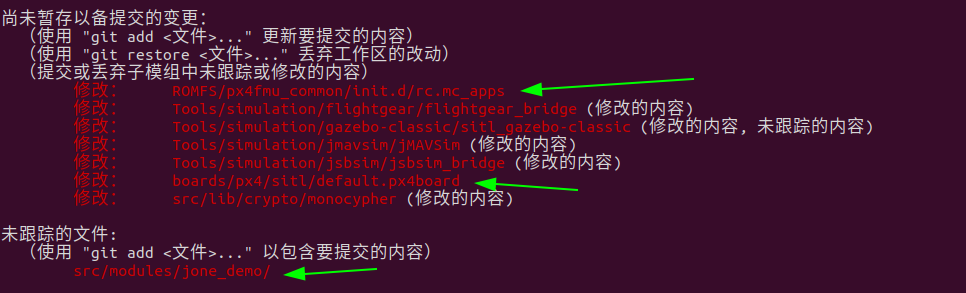
上面两个箭头上修改的文件,第一个是rc.mc_apps 是为了自启动修改的
而第二个箭头default.px4board 文件则是在运行 make px4_sitl_default boardconfig指令的时候通过gui的界面自动修改的,可以打开看下
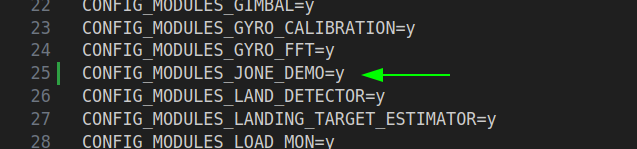
多了第25行的内容
通过下面指令将修改的内容加上
git add .
提交上去
git commit -m "Create Task and run"




点击“阅读原文”查看详情 |
|



 窥视卡
窥视卡 雷达卡
雷达卡


 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 照妖镜
照妖镜

